Hello, greetings, and well-wishes to you and yours!
There have been so many unprecedented goings-on in the world since our last update! First and foremost, I hope everyone is staying safe and sane, as well as taking care of those around us who can use our help. We’re all stuck together on this rock called Earth, hurtling through space, and there’s no higher calling than taking care of each other.
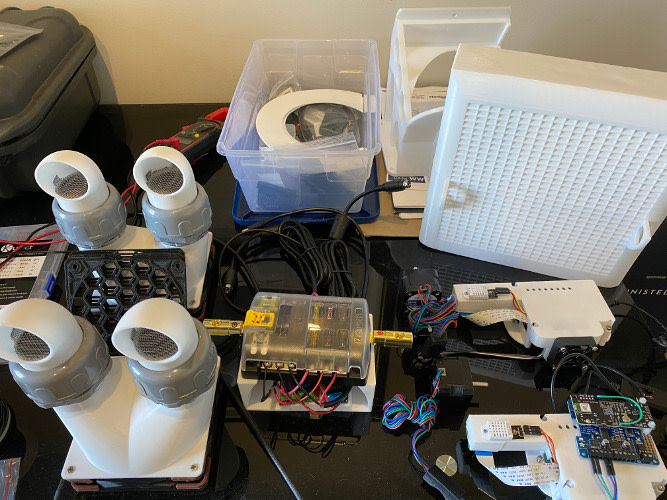
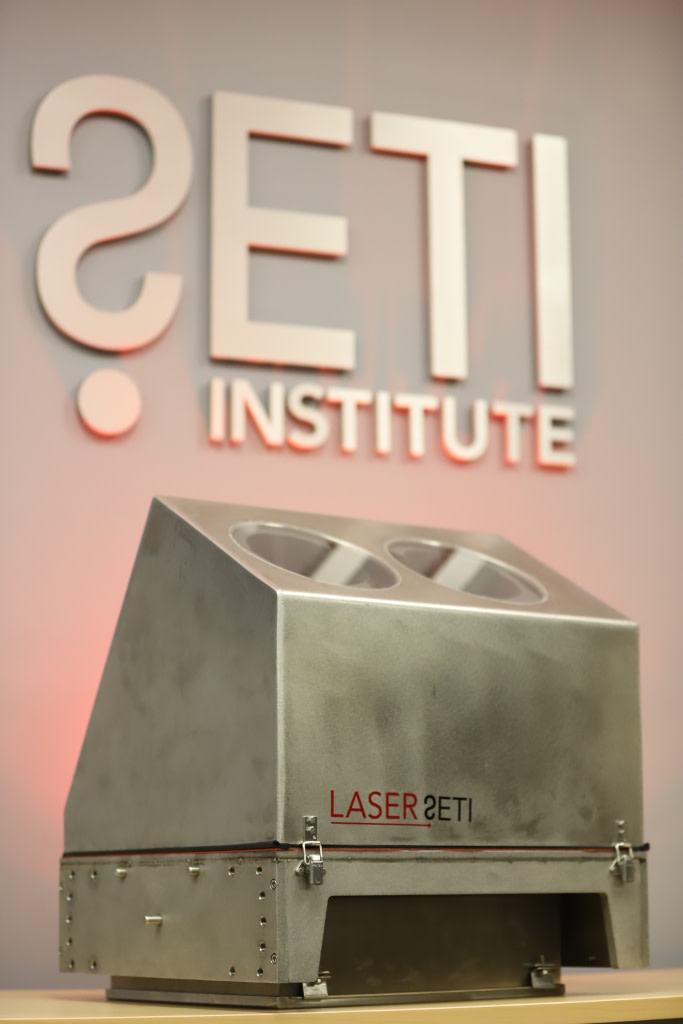
As for LaserSETI, progress is the name of the game. The components we build in-house are nearly complete. You can see many of the “unsung” components that go into the environmental and electronic support systems below. Last week, I visited the enclosure fabricator to review their just-completed parts and finalize the plan for painting them!
We have the least visibility on the site permit application with the state of Hawaii. The document was delivered by our university partner nearly two months ago, but the Dept of Land and Natural Resources is undoubtedly affected by the pandemic and not on their normal timeline for responding. We’re glad they’re operating at all in these crazy times and remain optimistic for a smooth approval process in a timeframe which matches the instrument build, testing, and shipment process. I have the utmost confidence in our Hawaiian partners and sometimes, once you’ve done your best, all you can do is keep your fingers crossed.
The next few months promise to be exciting and eventful in so many ways. As always, we’ll keep you up to date and thanks again for your support!
A lot has been going on and I wanted to tell you about it personally! In case you’ve forgotten, I’m Eliot Gillum and the principal investigator for LaserSETI.
Our last update was the exciting announcement that LaserSETI was installed at the Robert Ferguson Observatory in Sonoma County in Northern California. It was mostly pictures to help share the feeling of it all, but this update will be a lot more text, as I want to share some of the “hands on” behind the scenes action of commissioning a new instrument. In case that’s not your thing, I won’t be offended if you skip to the end for the exciting announcements.
Before getting into the specifics, I should say that, while none of the specific issues were anticipated (or else we would’ve addressed it ahead of time!), the general types and quantity were as expected. A sensitive instrument in an outdoor environment is always going to require tweaks. I also think it’s worth noting that—knock on wood—no “big scary” types of problems happened; nothing that threatened the design or instrument health.
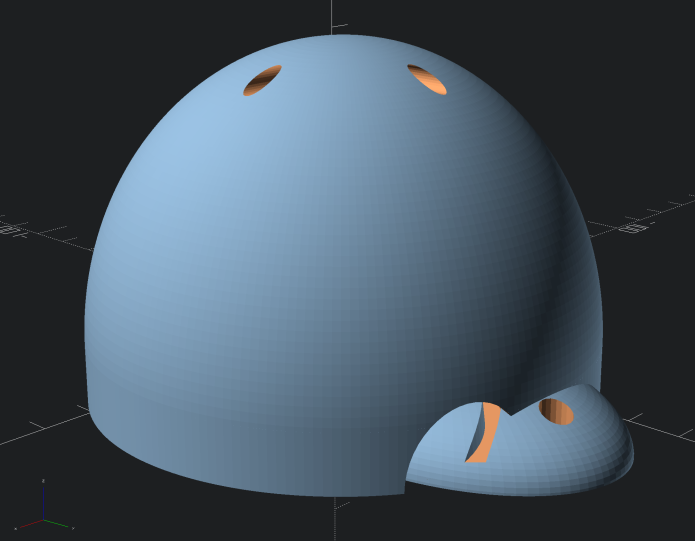
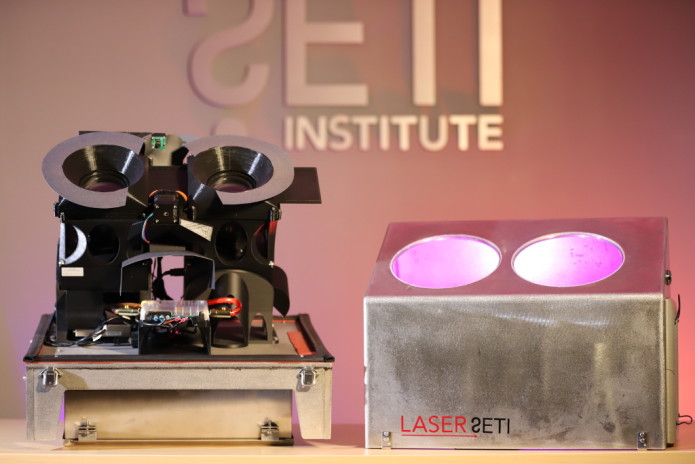
The first issue encountered was the interior temperature within the enclosure rising too high during the day, such that the cameras’ coolers were unable to maintain the CCDs at 0°C. This wasn’t an immediate problem because we can’t observe during the day, but the thermal cycling and extremes weren’t good for the equipment and, since we’ll be deploying to other parts of the globe that might be hotter than Northern California, it was important to get ahead of this. The problem wasn’t so much internally generated heat or ambient external, but insolation—direct sunlight. Our first course of action was to paint the cover with a special white thermal paint (see below) to dramatically increase the albedo (amount of light reflected) as well as aid radiative cooling from inside (see Figure 1). We also subsequently switched the color of the 3D-printed components to white, embedded mirrors in the sunshade, and improved the airflow from the instrument bay down to the wiring “bunker” where the exhaust fan and ports are located.
Figure 1 – LaserSETI covers after being painted white with specialized thermal paint
As some of you are likely aware, when 3D printing, a wide variety of different plastics can be used, each with their own unique properties: hardness, texture, impact strength, thermal, etc. At the high end, some very expensive materials are possible, as well as outsourcing to specialized shops with high end machines. But since one of LaserSETI’s fundamental principles is “low cost to achieve global coverage,” we have focused on “in-sourcing” the printing to keep costs low. We had started with ABS plastic, which is used for everything from LEGOs to hand tools, but our ABS printer started being unable to print large pieces and not even the manufacturer could figure out how. We decided to back off to PLA, which is much easier to work with and hope that the parts we used it for wouldn’t experience high enough thermal and mechanical loads. Unfortunately, its lower softening point conspired with the initially high internal temperatures, and we’ve had to replace all the PLA parts. The plastic we’re now using is polycarbonate, which has ideal thermal properties but required a new printer. The parts take longer to print but come out very high quality, although the printer has also proven itself a lot of work to keep operating smoothly.
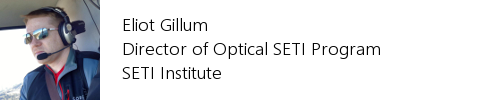
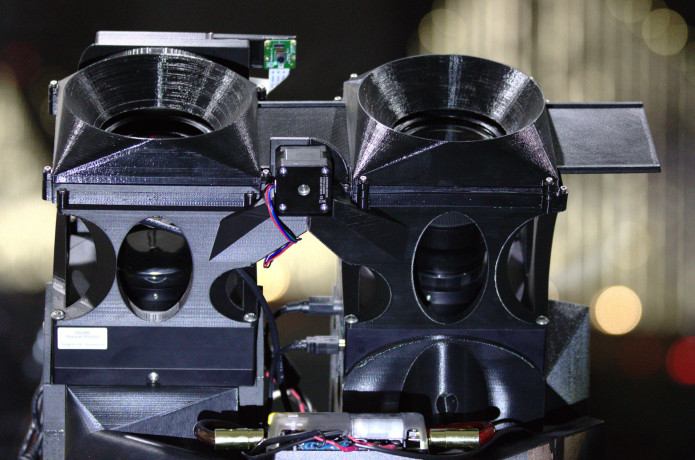
To keep peeling the onion, while the polycarbonate plastic is a great improvement overall, switching to it exposed a flaw in the gear tooth shape we’d designed into the sunshade mechanism. Since polycarbonate is more rigid, the sunshade started binding when approximately 75% open. Fortunately, we were at least still able to observe in that condition, while we investigated the problem. Once diagnosed, it was easy enough to design a better tooth, re-print the gears and sunshades, and re-install them on our next visit. In Figure 2, below, you can see the new trapezoidal gear tooth, as well as the mirrors added to reject additional heat from the sun.
Figure 2 – Interior view from pi camera: sunshade with embedded mirror, stepper motor, outside view
Besides the heat, the weather has thrown some other curve balls. Now that it’s winter, we expected more cloudy nights, which is partially compensated for by the longer nights to observe—and we’ve had some really great ones! Additionally, high winds have been an unexpected issue, since the power company aggressively shuts down power over large areas, in order to avoid more tragic firestorms like the Tubbs Fire of 2017. At one point, we were down for two weeks as the power went out and came back. Then, to add injury to insult, the power fluctuations were enough to damage the Ferguson VPN server, which required more time to replace. The silver lining has been a thorough test of the LaserSETI electrical systems, which passed with flying colors!
Figure 3 – Raspberry Pi at top center, humidity sensor, camera, motor, and GPS antenna cables visible
One piece of hardware which hasn’t been robust enough, however, is the Raspberry Pi single-board computer used in each instrument as its the central nervous system. It’s responsible for wide range of tasks, from monitoring environmental sensors, to controlling the sunshade, to the interior camera, to super accurate time using a specialized GPS. We build and solder all these various components ourselves and had initially optimized the design for a low profile, not knowing exactly how much clearance we had with the cover. Faced with transient electrical failures that were clearly related to thermal expansion and observing that we had enough spacing from the cover, we’ve greatly simplified the electronics design with the double benefits of making it more robust and easier to build!
The specialized GPS setup is interesting area for more detail. Most people know that GPS determines your location, but not everyone realizes it does that by determining the time very accurately: usually within hundreds of nanoseconds. LaserSETI uses this to synchronize observations across observatories, so we can match observations with confidence and even measure the arrival time delay based on the source direction! We’re using a commercial-off-the-shelf (COTS) GPS but with an additional wire called PPS, meaning “pulse per second.” This little wire has a “positive edge” at the precise beginning of each second and greatly improves the timing accuracy over the simple position reports via the serial port. At least, in theory, that is. It took months of reading, experimenting, and tuning to optimize the configuration so that the raspberry pi is accurate to within a dozen microseconds, and the PCs are usually within 100 microseconds!
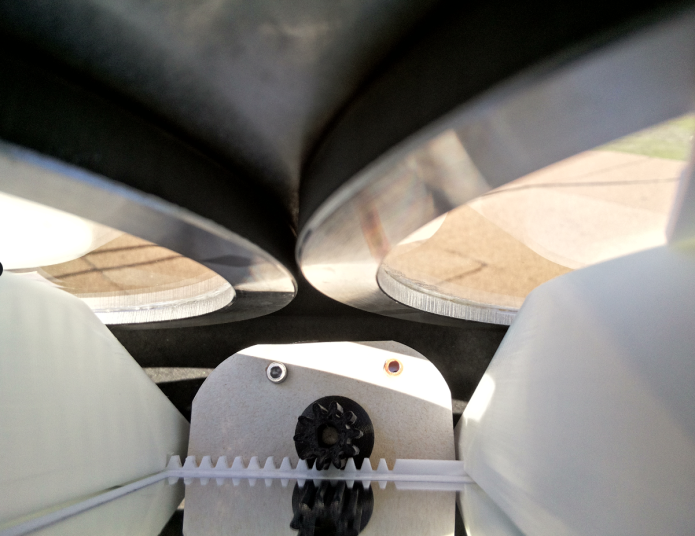
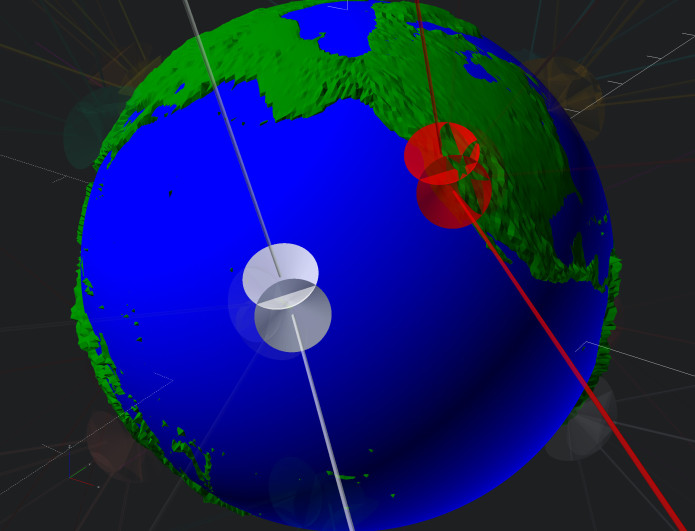
Figure 4 – Screenshot of real-time monitoring of clock delays (in microseconds)
Now, the system is so accurate, the biggest daily disturbance is when the sunlight suddenly hits the GPS antenna or goes away, because of the rapid change in temperature! In Figured 4 above, sunny days are yellow, cloudy are circled in white, and partly cloudy days in gray. And to try to address even this variability, we’ve designed a new GPS antenna mount with a sunshade, which we’re told looks like one of the bad guys from Super Mario (see Figure 5 below).
Figure 5 – GPS mount with new “Mario” sunshade, designed to reduce thermal shock causing clock drift
Another electronics issue has been a few random computer lockups. LaserSETI was designed to handle flaky cameras with relays so they could be power cycled, but not the PC or Raspberry Pi. We’ve now added a relay so the pi can reboot the PC, and are rewiring the PC-controlled relays to move both cameras onto a single relay, freeing up the other to allow it to reboot the Pi. The Ferguson staff have been very accommodating and helpful in so many ways, but we don’t want to ask more than necessary of them, plus as we go to Hawaii and beyond it’s critical the instrument is able to be self-healing.
Having taken data for months, we wanted to be able to examine it in detail, but we couldn’t exactly upload 13 TB (13 million megabytes) over the satellite link that connects Ferguson to the outside world. Forced to resort to “SneakerNet”, we built a 30 TB disk array, which has worked great—ever since a certain online retailer sent the right type of disks. We’ll continue to use this array to keep as much data as we can in the long term, for analysis and sharing too!
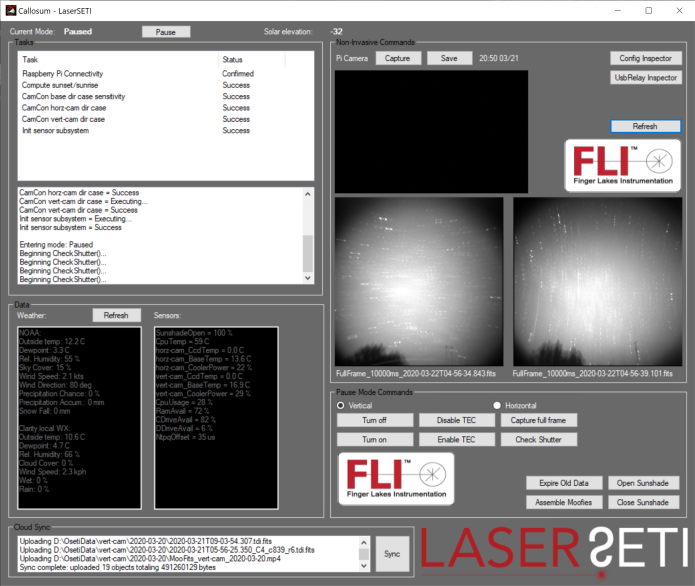
Figure 6 – Snapshot of controller software while observing recently
Because of all the work above, I’m pleased to share that we’ve begun building the second round of two instruments: the ones going to Hawaii. Now because our 33-page site permit application isn’t yet approved, we’re still not able to announce the exact location, but I think that’ll come in our next update. What I can say is that the cameras, the most expensive part of the instrument, have been built and shipped, the instrument design improved from electronics to steel, the fabricator has begun cutting and welding, and the 3D printer is running overtime.
While the engineering behind LaserSETI is fun, I know we’re all in it for the science. But since the plan for publishing the full instrument results involves having both observatories taking data, I thought we could at least offer a preview of what we’ve seen thus far. Bear in mind that, because we’re still working out the kinks in the commissioning process and don’t have Hawaii online yet, this is based on less than quarter of the system’s full observational capability, as funded by you. What I can say is that we haven’t yet identified any events that met our detection criteria and were seen simultaneously by both cameras within the instrument. We will, of course, keep taking more data every night it’s possible. And we’re reviewing the raw data, as well as detector thresholds and algorithms—now that we’ve got a lot more data to work with—to check for potential bugs or improvements.
I’d like to offer a brief preview for future updates. Our next one will probably be just before or after installing the instruments in Hawaii—after they’ve been built, tested, and shipped. Beyond that, we’ve got some exciting secondary (non-SETI) science to talk about, as well where LaserSETI will go after the culmination of this campaign.
Finally, I want to thank every single one of you for your support. While we certainly can’t buy parts and pay contractors without funding, knowing that there’s hundreds of people around the world who were just as excited about LaserSETI has meant the world to me and definitely provided extra motivation to make the project the most it can be!
This is the update we’ve been working all this time to send and you’ve been waiting for: LaserSETI is installed and pointed at the sky! As a result, we’re mostly going to let the pictures do the talking in this update.
A panorama gives the best overview of the installation on the Ferguson Observatory roof.
But this more zoomed-in view shows the instruments better.
And here you can see the northwest-facing unit basking in the sun and gorgeous Sonoma scenery.
A closeup of the rear of the instruments shows the GPS, power and networking ingress, and heat exhaust “tailpipes.”
A bit more artistic than scientific, this shot highlights the transmission grating at the front of the “optical train” with the Sun reflecting many times off the various internal surfaces.
Perhaps most importantly, here’s some of the incredible Ferguson team taking a quick break from their hard work to pose for the camera!
We hope you’ve enjoyed seeing LaserSETI set up as much as we have!
As with any new telescope or observatory, all the engineering must be tested and qualified before we can start doing science. We expect the next update to discuss any issues encountered and hopefully include our first “science-ready” images!
I’m pleased to announce that plans are nearly complete for the first LaserSETI installation: at the Robert Ferguson Observatory (RFO) in Sonoma County, California! LaserSETI Principal Investigator, Eliot Gillum, has built a collaborative and productive relationship between the SETI Institute and RFO, after locating the site based on complex astronomical suitability criteria. Working closely with RFO founding board member Dr. Gordon Spear, RFO Board President Dave Kensiski, and RFO Executive Director Chris Cable, the final logistics are being worked out for the placement of LaserSETI’s first observatory at RFO’s idyllic facility.
Dr. Spear, who is also Emeritus Professor of Physics and Astronomy at Sonoma State University, said he is “extremely excited” at the prospect that RFO will be partnering with the SETI Institute, adding significantly to the scientific research being performed at RFO, since their primary mission is focused on education. RFO hosts numerous events, field trips, and a steady stream of drop-ins from the public, adding up to more than 8000 visitors each year. We hope that you will take advantage of this location to visit LaserSETI. RFO has been a 100% volunteer organization since its founding in 2000, until recently hiring its first executive director.
Andrew Fraknoi, SETI Institute Trustee and Emeritus Professor of Astronomy at Foothill College, provided the initial introduction to Dr. Spear, who became immediately intrigued by LaserSETI’s novel approach to the search for extraterrestrial intelligence. “We’re thrilled to be able to make a difference for SETI in this way,” stated Dr. Spear. “There were some challenges gaining the buy-in of other board members.” He described that even with an educated group of astronomy advocates, the idea of SETI was not immediately well understood. But after sharing information about the SETI Institute and the LaserSETI proposal, the RFO board members quickly understood that not only is SETI extremely serious science, LaserSETI itself is cutting edge. Learning about the SETI Institute’s expansive public outreach and education programs “really sealed the deal.”
The SETI Institute looks forward to working closely with RFO to create a LaserSETI exhibit within RFO’s museum and classroom. We are now beginning discussions around educational programming opportunities upon which to collaborate, as well.
And, while it’s premature to make a formal announcement, I’m excited to share that we have been in discussions with an observatory in Hawaii for placing a matching set of LaserSETI instruments there, to pair with those at RFO. We’ve cleared a number of important hurdles and are very optimistic about having that site online soon after the RFO site is established.
So stay tuned for some very exciting LaserSETI announcements very shortly!
Greetings LaserSETI supporters. Many of you may have been wondering if the project was proceeding, but I write today to assure you it has and provide a comprehensive report on our progress these past 9 months since we last updated you. We apologize for the stall in our communications to you, and will definitely improve the pace of our reports to you as we drive forward to deployment on the sky!
At the time of the last update, in June 2018, two LaserSETI cameras were mounted with their gratings, and lenses into 3-D printed mounts, and fabrication of their environmental, stainless steel enclosure was anticipated to start within the week in accordance with detailed CAD drawings. First light on the observing system of 2 enclosures (4 cameras) was estimated to be 4 months away.
So, here we are 10 months later, having worked through an intensive Devil-is-in-the-details epoch—and, where are we? Very close! The instruments are fully built and undergoing the last test required before going out under the sky.
Fabrication
The CAD drawings for this component underwent several modification cycles to make sure the first two units manufactured would be as close as possible to the final configuration to be deployed globally. East Bay Machine and Sheet Metal in Concord CA was selected to do the precision component manufacturing because of their previous experience with astronomical observatories and their expertise in working stainless steel. Injury on their staff caused the delivery date to slip to late October.
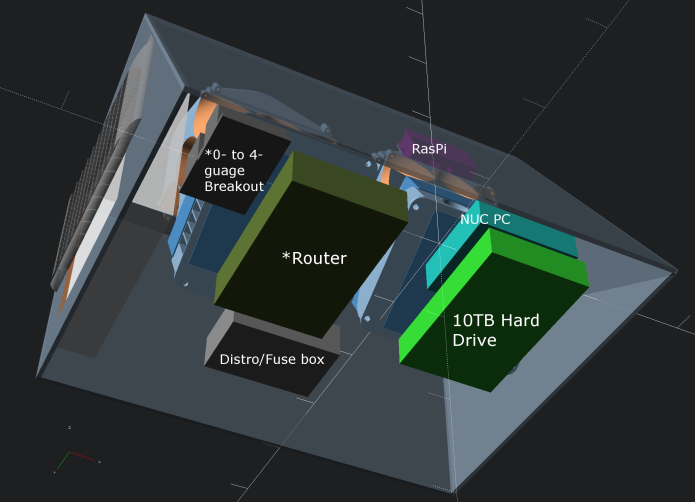
The delivered units, due to the difficulties in stainless steel welding, contained an unanticipated and uneven gap between the cover and base of the enclosure. This was eventually sealed with a combination of silicone rubber sheet and weather-resistant EPDM foam. Two 200 mm diameter, 6mm thick, optically flat Borofloat windows were sealed in place with E6800 industrial adhesive and tested by floating the cover upside-down as well as outside in winter rains, to validate all the waterproof seals. Cameras, gratings, motorized shutter windows, a Raspberry Pi 2b control computer with a GPS-based microsecond-accurate time server and environmental sensor suite, MERV13 air filter, Intel PCs for image processing, 10 TB hard disk for data archiving, and a 12VDC power distribution block with fuses were installed, wired, and tested inside the two enclosures. Care was taken with component placement and individual light baffles were implemented to ensure that no light from the various LEDs could enter the cameras.
Once all the equipment was installed and the enclosure sealed, thermal testing began and identified an inadequacy in heat elimination: the camera-powered exhaust system, which had already been scaled back to support cover removal, wasn’t pushing heat efficiently enough out of the enclosure, causing the cameras to warm up. Several simple designs were tested, and the most effective design was an “active tailpipe,” shown below. A single high-quality computer fan sits behind these two downward-facing exhausts, forcing a strong outward airflow, through a stainless-steel mesh which protects against ingress of foreign objects, while the large area of the MERV13 filter lets in clean, cool air into the instrument bay. The system now keeps the camera bodies within 4C of internal ambient temperature which in turn is within 10C of external ambient—a good balance to keep warm in the winter and cool in the summer.
Site Deployment
While our original plan was to partner with an optical observatory in California, we ultimately decided on the Hat Creek Radio Observatory—home of the SETI Institute’s Allen Telescope Array. Since LaserSETI’s unique imaging technique adds up light across its whole field of view, it was a better site because the lower light pollution levels mean more sensitivity to faint signals.
There are other synergies associated with this choice of a SETI-focused facility, but one obvious problem: this is a radio astronomy facility, and therefore particularly sensitive to RFI (radio frequency interference) potentially generated by the digital components of LaserSETI. As such, it is necessary to ensure that the additional electronics does not interfere with the sidelobes of the extremely sensitive telescopes. A test plan to evaluate LaserSETI against ITU Rec 279 has been developed and is to be executed soon. This is the last remaining test, necessarily coming after all other modifications to the instrument and enclosure.
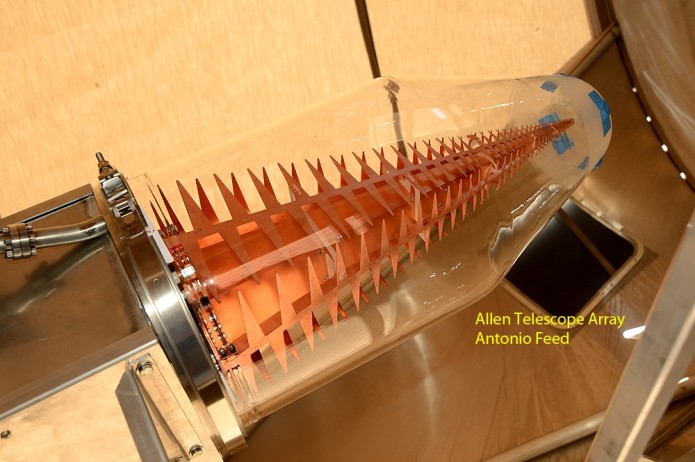
We will perform the tests in the shield room at Minex Engineering in Antioch, CA. We will use an ATA “feed” as the receiver and test at all frequencies from 1 to 10 GHz (the frequencies at which the ATA operates) using a spectrum analyzer programmed to step the receiver frequency band with 10 Hz spectral resolution, maximizing lab sensitivity to any squeak Laser SETI might emit. At this resolution, it takes just under 10 seconds for each 1 MHz of bandwidth tested, so something over a day for the full scan. We’re planning on a week to complete these tests. This is an unanticipated requirement, but one that makes a great deal of sense, both now for this first deployment but also future sites around the globe where the ideal site may again be a radio observatory.
Assuming no significant and difficult issues are found in the RFI testing, deployment is now projected for late April or early May. Then we begin the first operational phase: seeing every aspect of the carefully designed and tested system validated in the field—and gathering enough observational data to begin to analyze Laser SETI’s unique window on the universe!
While I’m certain you were hoping this was yet another GDPR email, the actual reason is that it’d been a while since our last update!
To cure your double-whammy blues, the SETI Institute’s very own Senior Astronomer, Franck Marchis, will do a live interview with LaserSETI project scientist, Eliot Gillum–tomorrow!
So tune in Wednesday, June 6th at 2pm, to hear the latest on construction status, site selection, and schedule going forward. As always, just go to the SETI Institute page on Facebook to join in on the discussion!
For a bit of fun, and as proof that all the wonderful supporters of LaserSETI are always on our mind, here’s Jill Tarter with Eliot Gillum showing off their delicious pie for Pi Day!
We’re expecting big news in the next few months that you won’t want to miss, so stay with us and keep looking up!
We received requests following the last update to see the real sun-shade doors in action so, by popular request, please enjoy exactly that:
Astute observers may notice that only one instrument is fully populated with optics. The other is empty as we work on the Raspberry Pi which will attach to that camera and controls the double doors, provides GPS time synchronization, and measures the environment inside the enclosure using a camera, accelerometer + gyroscope (IMU), barometer, and thermometer.
Speaking of the environment, it’s rough outside! While we’ve designed the enclosure to tolerate and operate in as wide a range of weather as possible, it’s impossible to predict with 100% confidence that we’ve succeeded in protecting the electronics and optics from the elements and maximizing the adverse conditions—mostly wind, temperature changes, and humidity—that we can reliably observe. We’re particularly interested to compare our inertial measurements to local wind speeds to know how much wind is too much and causes the cameras to vibrate. We’ll also measure temperature and pressure for correlation with any fogging that (shouldn’t but) might occur and have a camera to visually track the internal environment—primarily to monitor the shutter doors and optical window, but also to catch something we didn’t expect, like a squirrel infestation. (Which we’ve therefore now prevented by expecting it ahead of time!)
Recall last edition’s exciting announcement that we’ll be building eight cameras into four enclosures split across two observatories (looking at two fields of view). Our deployment plan is as follows: Start with two enclosures at one observatory, and make sure they survive the most extreme weather for at least 3-6 months. Then deploy the second two enclosures at a second observatory, iterating on the design as necessary or at least having gained confidence that this expensive hardware won’t get damaged sitting on top of mountains for years at a time!
Lastly, we wanted to make sure you heard about a special achievement from an unrelated but also crowdfunded project at the SETI Institute. Unistellar has partnered with us to bring to life a new kind of telescope, the eVscope ™, which makes amateur astronomy not only super easy but, using a radically new hybrid digital/optical system, it yields striking images normally only attainable by telescopes many times its size and uses that same technology to contribute to science.
They had a wildly successful campaign, raising over $2M, and even though only a first few prototype units have been built, they’re already producing scientific results! The eVscope’s observations of an asteroid occulting (blocking) a star, allowed scientists to more precisely constrain the orbit and shape of this far out object. This normally requires a lot of luck and then very challenging coordination between multiple observatories, but a network of mobile enthusiasts is remarkably in a better position to do with the aid of modern technology!
Their powerful, portable “smart” telescope is available for pre-sale now, and is expected to ship to customers by the end of 2018. We hope their experiment in revolutionizing astronomy and citizen science is successful and serves as a model for other such projects!
Thank you for reading, please remember to follow the SETI Institute on Facebook and Twitter for more groundbreaking news, and as always thanks for your support!
Hello and happy Trip Around the Sun 2018! We’d like to help start your year in a positive way with a very exciting announcement.
Thanks to additional donations outside of the Indiegogo campaign, we’re going to be able to deploy EIGHT cameras instead of four, meaning that we can fully monitor two independent fields-of-view! This is not only very exciting because we’re twice as close to all-sky coverage, but it’s an ideal balance between risk and progress. We need to prove out the instrument, housing, and operations before putting too much hardware at risk, yet two fields-of-view enable us to compare and contrast what we see in two different parts of the sky. This can be critical when you’re doing exploratory observations, for instance helping to distinguish instrumental effects from actual observed phenomena.
We’ll start by deploying two enclosures (four cameras) to the first site, then let those “bake” through the worst weather we can find. Then, in the second half of this year, we’ll deploy the other two to another site thousands of miles away but pointing at the same two patches of sky. Having four cameras from two sites looking at each patch of sky not only gives us stellar confidence in any events we observe, it also provides coverage in case one site has inclement weather. That’s what it takes to watch all the sky all the TIME!
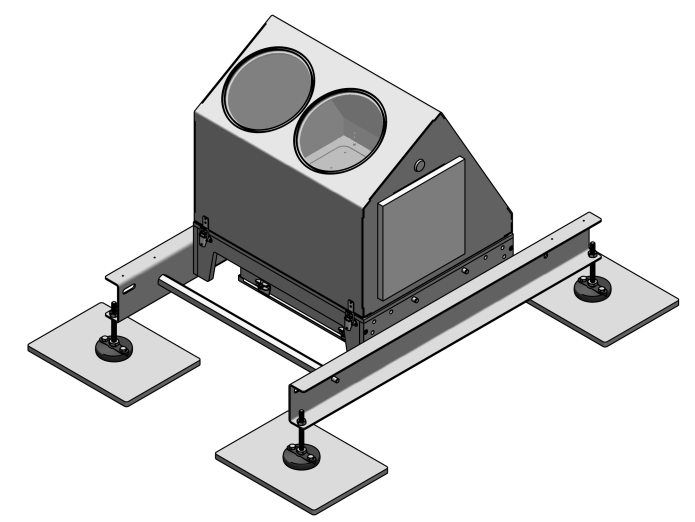
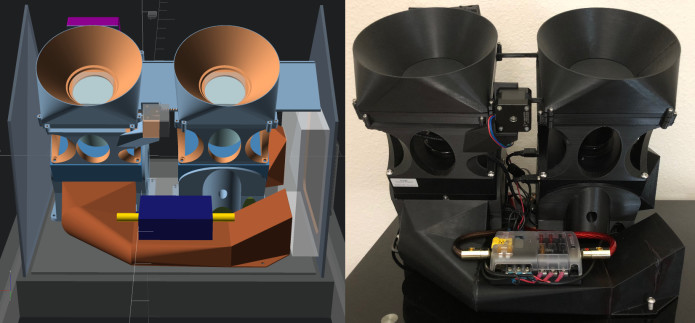
The engineering model on the left (with some panels removed for visibility) is rapidly turning into reality! The sun shade opens and closes, both in this movie and in real life, and we’re now focusing on the environmental sensor suite: GPS, accelerometers, temperature, barometer, and of course integrating data from local observatory weather systems. We’re iterating on the mechanical drawings for the enclosure and box underneath which, in addition from protecting the equipment from the elements, will allow the whole system to be tilted forwards or backwards to facilitate field alignment across observatories. The second pair of cameras have been delivered from the manufacturer, and we’re working with them on a software upgrade to speed the readout rate which might nearly double our sensitivity to short pulses!
Following up on previous updates, if you missed the Facebook Live we did with Laser SETI scientist Eliot Gillum and Indiegogo campaign whiz Ly Ly, the first and second half videos are available on the SETI Institute Facebook page! And finally, all perks were shipped at the end of Nov or early Dec, so we hope everyone has received their order and is now showing it off with the kind of pride and zeal normally reserved for pictures of a first-born child!
We interrupt the regularly scheduled programming for a brief announcement:
Encouraged by your positive feedback on these updates via Indiegogo, we thought you might enjoy a LIVE video Q&A session with the people behind the Laser SETI campaign and project! Hear the story behind the perks and progress on the engineering.
Find us on Facebook, @SETIInstitute, and join us this Monday afternoon at 3:30pm (Pacific time). Bring your questions, stay for the great science news!